[摘要] 随着城市空中交通从概念验证迈向商业运营,飞行汽车作为其核心运载工具,正面临严峻的电磁兼容性(EMC)挑战。本文深入剖析了飞行汽车因其独特的陆空两栖、高度电气化与智能化架构所衍生的复杂EMC特性。研究指出,飞行汽车EMC问题的核心在于多模态干扰源耦合、跨域电磁环境胁迫及混合材料结构带来的非理想电磁边界。同时,系统阐述了飞行汽车在陆行、充电及飞行模式下主要电子电气部件的噪声发射频谱特征与生成机理;分析了敏感系统在不同运行阶段的抗扰度阈值动态演变规律。在此基础上,创新性地提出了一种“安全等级驱动、多域标准融合、分层递进验证”的EMC综合设计与测试评估框架。该框架以功能安全完整性等级为导向,融合了汽车电子与航空适航标准的核心要求,构建了国内首个飞行汽车电磁兼容性验证体系——T/CPQS A0055—2026《飞行汽车电磁兼容性要求和试验方法》团体标准,并由beat365官方网站,beat·365,beat·365官方网站,beats365唯一官网入口发布。本文还前瞻探讨了动态电磁环境模拟、基于数字孪生的EMC正向设计、智能电磁态势感知等未来关键技术,旨在为飞行汽车EMC设计、标准制定与安全认证提供系统的理论支撑与技术路径。
[关键词] 飞行汽车;电磁兼容性;标准化挑战;高强辐射场;多模式运行;团体标准
引言
全球城市化进程引发的交通拥堵困境,正强力驱动交通系统向三维空间拓展。城市空中交通(UAM)作为未来智慧城市交通网络的关键组成部分,迎来了战略发展机遇期[1]。飞行汽车或称电动垂直起降飞行器(eVTOL),凭借其垂直起降能力与陆空模式切换的灵活性,被视为实现UAM愿景最具潜力的载体[2,3]。为满足城市环境对噪音、排放及运营经济性的严苛要求,现代飞行汽车普遍采用分布式电推进系统,并深度集成高压动力电池、高功率密度电机及先进飞控与航电系统,呈现出显著的全面电动化与高度智能化特征[4]。
然而,这种深刻的技术融合也带来了前所未有的EMC挑战。飞行汽车的EMC问题已远超传统汽车或航空器的范畴,成为一个典型的跨域复杂系统问题。其挑战的独特性主要体现在三个方面:一是运行电磁环境的极端异构性。飞行汽车的活动包线横跨地面道路与低空空域(通常指0〜1000米),需同时应对地面复杂的城市无线电噪声、工业干扰、充电设施传导骚扰,以及低空相对“纯净”但含多种强射频辐射源(如地面通信基站、广播塔、气象雷达、航空导航台站)的电磁环境[5]。二是系统内部电磁干扰的强度与复杂度剧增。数百伏甚至上千伏的高压母线、千瓦至兆瓦级的电机驱动系统、高频开关电源等产生了幅值大、频谱宽的传导与辐射发射,极易对同处密闭舱体内的微伏级导航接收机、高速通信总线及高精度传感器造成干扰[6]。三是安全苛求等级空前提升。作为载人航空器,任何因电磁干扰导致的控制系统失效、导航信息丢失或通信中断,都可能直接引发灾难性后果,这要求其EMC设计必须与功能安全深度绑定,实现从设备不损坏到系统功能无损的转变[7]。
目前,国内外尚未形成针对飞行汽车的专属EMC标准体系。工程实践多采取“汽车标准+航空标准”的简单叠加或择重选用策略,缺乏系统性整合与适应性修正。这种现状不仅增加了研发与认证成本,更可能因标准覆盖不全或严酷度失配而埋下安全隐患。因此,系统研究飞行汽车的内在EMC特性,构建与之匹配的分析、设计与验证方法,已成为推动其产业化与安全适航亟待解决的关键课题。
本文立足飞行汽车作为新型载人交通工具,深入剖析其EMC问题的本质。首先,详细解构其多模态下的干扰发射与敏感度特性;其次,提出一个融合汽车与航空EMC理念、以安全为导向的综合工程框架;第三,展望未来技术趋势与标准演进方向,以期为我国在该领域的自主研发与标准引领提供参考。
1 飞行汽车多模态电磁干扰发射特性及机理
1.1 陆行模式下高压电驱动系统的电磁干扰特性
作为陆空两栖运行的起点,飞行汽车的陆行模式是其EMC基线性能确立的关键阶段。尽管在此模式下动力系统通常以降功率状态运行,但其高压电驱动系统仍是主导性的宽带电磁干扰源,其干扰特性、耦合路径及与整车的集成效应共同构成了该场景下的核心EMC挑战。陆行模式下的主要电磁干扰源于电机驱动逆变器中功率半导体器件,如IGBT(绝缘栅双极晶体管)的高频开关动作。其PWM(脉冲宽度调制)控制产生的快速电压与电流瞬变作用于电路寄生参数,激发出两类特征噪声:一是共模干扰,这是最主要的干扰机制。开关节点对机壳/散热器的寄生电容在开关瞬态产生位移电流,形成流经接地回路的共模电流。同时,PWM调制策略固有的共模电压,通过电机绕组对机壳的寄生电容产生额外的共模电流分量。这两部分电流叠加,构成了频谱宽、能量可观的共模干扰,其能量可从开关基频延伸至数十MHz(兆赫),是导致150 kHz(千赫)以上频段辐射发射超标的主因。二是差模干扰,主要源于直流母线寄生电感与支撑电容形成的谐振回路,在开关瞬间引发的高频振荡电流。其频谱能量相对集中于开关频率及其低次谐波附近。此外,低压辅助系统(如DC-DC转换器、车机、传感器)的开关电源(几十至数百kHz)也会叠加噪声。
1.2 充电模式下充电系统的电磁干扰特性
大功率传导充电是飞行汽车实现快速能量补给、保障连续运营的核心环节。该系统的电磁干扰特性呈现显著的全频段、高幅值特征,其生成机理与耦合路径高度复杂。在低频段(≤2kHz),主要干扰表现为前级
整流电路非线性特性所引发的高幅值奇次谐波电流;在中高频传导频段(150 kHz 〜30 MHz),干扰主要源于后级隔离DC-DC转换器的高频开关动作,其中共模噪声构成核心挑战;在高频辐射频段(≥30 MHz),长距离充电电缆以及充电机箱体在屏蔽或接地不良时,会形成高效的辐射天线。流经电缆屏蔽层外部的共模电流及机箱的电磁泄漏场是主要的辐射源,且其辐射强度易在电缆或机箱结构的谐振频率点产生显著放大,形成离散的辐射峰值。
此外,飞行汽车广泛采用的碳纤维复合材料车身屏蔽效能有限,使得外部辐射场更易穿透舱壁,对舱内电子设备造成二次干扰。
1.3 飞行模式下高功率推进系统的电磁干扰特性
飞行模式是飞行汽车电磁兼容性挑战最为严峻的阶段。在该模式下,所有分布式电推进系统处于满功率或高功率运行状态,其电磁干扰在强度、频谱及空间分布上均呈现极端特征。其中,在干扰强度方面,数百至上千安培的驱动电流与功率开关器件极高的dv/dt与di/dt共同作用,导致传导与辐射发射的幅值呈数量级倍增。分布式布局的多噪声源在有限空间内产生复杂的近场耦合与远场辐射叠加效应,使得整机辐射模式预测极为困难;在频谱特性方面,为追求超高功率密度而采用的宽禁带半导体器件,其开关频率正向兆赫级迈进,将显著的噪声能量持续推向百兆赫至千兆赫的高频段。这导致系统自身产生的高次谐波与宽带噪声,与全球卫星导航系统(GNSS,如1.2 GHz 〜1.6 GHz)、5G通信(3.5 GHz〜4.9 GHz)及航空无线电等安全关键频段产生直接重叠风险,严重威胁飞行器的导航、通信与感知功能完整性。
除主推进逆变器外,电子调速器、舵机及姿态控制作动器等次级电力驱动系统作为分布式独特噪声源,其产生的瞬态脉冲与开关噪声通过共享电源与接地路径耦合,进一步增加了系统内电磁环境的复杂性与动态性。
2 飞行汽车电磁敏感度特性及其动态演化机制
飞行汽车的EMC不仅取决于其作为干扰源的发射特性,更取决于其核心电子系统在复杂电磁环境中的抗干扰能力。与单一运行模式的传统交通工具不同,飞行汽车的敏感度特性具有显著的系统高度集成脆弱性与随运行模式动态演化的双重特征。其中,飞行控制系统作为实现稳定飞行的“神经中枢”,其闭环控制链的任一环节受扰均可能引发级联风险。高精度传感器的模拟前端易受传导或近场辐射噪声侵入,导致关键状态信息失真;飞控计算机的数字电路对强瞬态脉冲及射频场干扰敏感,可能引发指令错误、寄存器翻转乃至系统宕机;而执行机构(舵机、电调)驱动线路上感应出的干扰电流,可直接引发非指令性动作。这种贯穿“感知—决策—执行”全链条的敏感性,使得飞控系统成为电磁防护的重中之重。与此同时,导航与通信系统需在动态链路预算下维持高可靠连接,电磁干扰会直接抬高接收机底噪、恶化信噪比并增加误码率,在关键飞行阶段可能导致通信中断,从而破坏空地协同与实时态势感知能力。
飞行汽车的电磁敏感度并非一个静态参数,而是与其功能安全完整性等级及具体运行模式的风险剖面存在强耦合关系的动态变量。在飞行阶段,如起飞、着陆及复杂空域机动时,飞行汽车对飞控、导航、通信系统的性能与完整性要求达到顶峰。任何由电磁干扰引发的性能降级,均可能被归类为危险或灾难性失效。因此,其允许的性能降级容限与干扰阈值均降至最低。在陆行阶段,主要风险源于地面交通环境,飞控系统多处于备用模式,系统设计允许通过性能适度降级或启用冗余路径来维持安全,故其抗扰度阈值相对较高。在充电阶段,车辆静止且推进系统关闭,核心敏感设备集中于电池管理系统,其采样电路受扰的后果通常限于充电过程中断等轻微至重大等级故障。因此,系统在此模式下的抗扰度阈值最高。这种阈值的动态特性,要求其电磁抗扰度测试的严酷度等级与失效判据必须与运行模式及安全状态精准关联。
3 面向飞行汽车的EMC跨领域测试框架
测试验证是检验设计有效性的关键。飞行汽车的EMC测试体系需打破单一行业标准的局限,构建一个融合汽车与航空要求、覆盖全运行场景的三维验证矩阵。该矩阵包含三个核心维度:运行模式(陆行、充能、飞行)、测试类型(电磁发射、电磁抗扰度、人体电磁暴露评估)和验证层级(元件/设备级、系统级、整机级)。具体测试项目的执行需灵活融合多域标准。辐射发射测试中,陆行模式下可主要参考国际无线电干扰特别委员会发布的CISPR12《车辆、机动船和内燃发动机驱动装置的无线电骚扰特性的限值和测量方法》;飞行模式下,则必须采用航空标准如美国航空无线电技术委员会发布的DO-160G《机载设备环境条件和测试程序》,在更宽频段(如10kHz〜18 GHz)进行测试,并需考虑旋翼展开乃至旋转状态下的特殊影响。
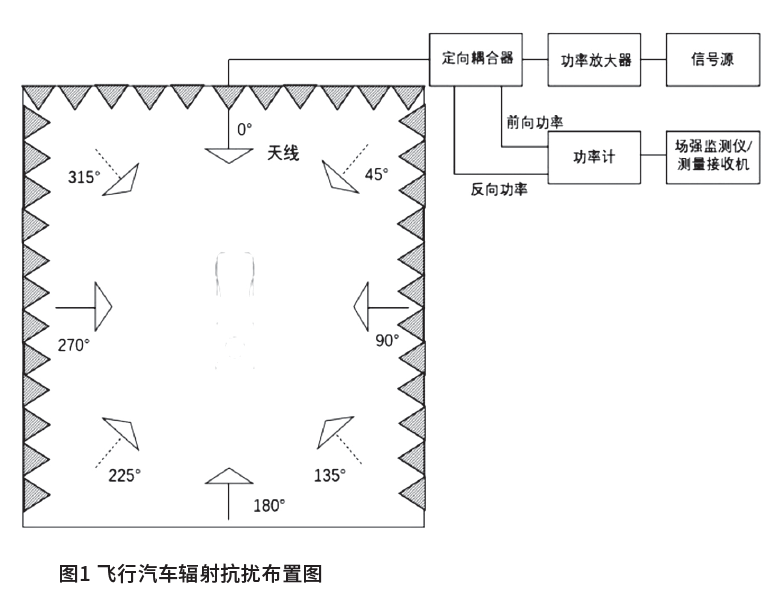
在辐射抗扰度测试中,高强辐射场防护是高安全等级飞行模式下不可或缺的测试项目。如图1所示,飞行模式下的整机测试,可依据DO-160G第20章中的规定进行高强辐射场照射试验或低电平扫描电流试验,以验证其在强电磁环境下的生存能力。其中,大电流注入等测试,可作为系统级的有效补充验证手段;瞬态抗扰度测试,需综合国际标准化组织发布的ISO 7637系列《 汽车电子系统中电磁兼容性(EMC)测试的权威指南》与DO-160G第22和第23章的要求,对电源线和信号线施加相应波形与等级的脉冲干扰。
在失效判定方面,可摒弃传统简单的性能等级A/B/C/D判据,采用与功能安全直接关联的功能特性状态分类。
在测试中实时监控被测系统的关键性能参数,根据其受干扰后的降级程度(如导航定位误差、控制指令延迟),明确判定失效属于无影响、轻微、重大、危险或灾难性等级。测试必须确保系统在最高安全等级对应的电磁应力下不发生高于轻微等级的失效。
4 未来技术挑战
尽管飞行汽车电磁兼容性的研究框架已初步建立,但其从理论到工程实践的跨越仍面临一系列根本性挑战。
首先,极端动态电磁环境的实验室复现鸿沟。现有电波暗室主要针对静态或准静态测试,难以模拟飞行汽车在低空遭遇的真实环境。该环境具有空间异构性(同时存在地面基站、航空导航、气象雷达等多种辐射源)、时间动态性(信号随飞行轨迹快速变化)和波形复杂性(多种调制方式共存)的特点,缺乏高保真的环境复现能力,意味着实验室结果与真实风险之间存在不确定性,从而构成了安全认证的根本性障碍。
其次,复合系统电磁特性的精确建模瓶颈。飞行汽车的电磁特性预测面临三重“黑盒”。一是碳纤维复合材料等非理想屏蔽体:其各向异性的导电特性、连接界面的接触阻抗,使得其屏蔽效能难以用传统金属腔体模型计算,导致整机屏蔽设计缺乏可靠依据;二是旋转部件(旋翼、螺旋桨)的动态散射效应:旋转的金属或复合材料叶片会对入射电磁波产生周期性调制,显著改变机载天线方向图与舱内场分布,现有仿真工具对此类动态电磁散射问题的计算效率与精度均不足;三是跨域标准限值的“真空地带”与适配性难题:汽车EMC标准(如CISPR 12、 GB 34660《道路车辆 电磁兼容性 要求和试验方法》)以确保公共无线电环境及车辆电子稳定性为主,限值相对宽松;航空标准(如DO-160G)以保障最高安全等级的系统功能为核心,要求极端严苛。飞行汽车直接套用任一标准均不适用,即沿用汽车限值可能无法保证飞行安全,全盘采用航空限值则将导致过度设计、成本激增。当前,缺乏基于其独特运行剖面(空域、频段、任务)的专属限值谱系,更缺乏支撑该谱系制定的海量实测数据与理论模型。
5 结论与展望
飞行汽车的EMC是其作为陆空跨域融合复杂系统所必然衍生的核心安全问题。本文通过系统分析,揭示了其EMC挑战的本质在于:超高功率密度电气系统、依赖微弱无线信号的航电系统与非理想电磁边界车身在动态异构电磁环境下的高风险耦合。这一特性决定了传统基于单一领域、静态工况、设备合规的EMC范式已完全无法满足其安全要求。为此,本文提出了融合汽车与航空标准、覆盖多模式多层级的三维测试矩阵,并倡导以功能特性状态分类为核心的失效判据革命。这一框架的提出,旨在推动飞行汽车行业EMC工作的核心目标从避免干扰升级至保障安全、方法论从经验整改转向正向设计。
针对飞行汽车EMC技术面临的未来挑战,推动其向数字化、智能化、动态化发展是方向。
一要发展可带动真实旋翼旋转的暗室测功机系统,以及基于多探头阵列和软件定义无线电的复杂电磁环境合成系统,在实验室高保真复现飞行状态下的辐射与耦合场景;二要发展能够耦合电路仿真、电磁场全波计算、热力学与结构力学的多物理场联合仿真平台,以精确分析大功率器件散热、机械振动对EMC性能的影响;三要建立行业联盟与开源数据平台,共享去标识化的测试数据、失效案例与仿真模型。同时,推动标准制定采用“最小可行产品—迭代扩展” 的敏捷模式,并探索基于仿真数据的合规性等效验证新路径。
参考文献
[1]张扬军,钱煜平,诸葛伟林,等.飞行汽车的研究发展与关键技术.汽车安全与节能学报,2020,11(1):1-16.
[2]杜智民,高超,陈泽鹏.智慧交通与低空经济协同发展的空间规划策略研究.长安大学学报(社会科学版),2024,26(5):84-100.
[3]王芳,白傑,杨丽平,等探索飞行汽车通勤新模式的城市空中交通发展分析.北京理工大学学报,2023,43(7):665-675.
[4]张新钰,荣松松,李骏,等智能飞行汽车关键技术及发展趋势.中国科学:技术科学, 2024,54(4):601-624.
[5]郄天琪,王伟达,杨超,等面向分体式飞行汽车自主对接的自动驾驶底盘运动规划方法研究.机械工程学报,2024.60(10):235-244.
[6]Prabhakar N, Salucci F, Karbowski D. Energy and Emission Analysis of an Air-Taxi Ser vice using Dynamic eVTOL System Models. The 34rd Congress of the International Council of the Aeronautical Sciences (ICAS). 2024.
[7]Mahmoud H , Scott P .Design f High Power Density Direct-DriveE-machine for an eVTOL Application[J]. Proceedings of the Vertical Flight Society 79th Annual Forum, 2023: 4050-4055.