[摘要] 随着我国智能网联汽车产业的飞速发展,为实现更高级别自动驾驶需要坚实的线控底盘技术支撑,而线控转向则是线控底盘技术中的重点和难点。为规范和引导我国线控转向技术和产业发展,新版国家标准GB 17675—2025 《汽车转向系 基本要求》已于2025年12月发布,对线控转向法规标准进行研究,实车验证测试方法是必要举措。本文概述了线控转向及其法规标准的发展,探究了线控转向系统的基本结构及工作原理,并对线控转向国内外相关法规标准内容进行了对比分析研究,最后依据GB 17675—2025开展了线控转向实车道路性能测试,验证了新版标准对线控转向车型的适用性,为相关法规标准的制修订提供经验参考。
[关键词] 线控转向;标准;GB 17675—2025标准;实车道路性能测试
孙岳
中汽研汽车检验中心(天津)有限公司工程师,
主要从事公告、委托类整车测试,具备专业的测试能力和法规标准经验积累,
参与新版GB 26149-20XX《汽车和挂车轮胎气压监测系统的性能要求和试验方法》修订工作,
研究方向为整车法规标准道路性能测试。
引言
2020世界智能网联汽车大会上发布的《智能网联汽车技术路线图2.0》,规划了我国智能网联汽车2020年至2035年的发展路线[1],并预测我国智能网联汽车将呈持续高质量发展之势,至2035年网联式高度自动驾驶车辆将得到广泛应用。而近年来成为业内研究热点的线控底盘技术,是实现高级别自动驾驶的关键,其中线控转向更是重点和难点。
线控转向技术完全解除了转向盘与转向车轮间的机械连接,易于将转向系统平台化、模块化,一套系统可应用于不同车型。目前,我国线控转向技术研究已从科研导向发展为产业导向,多家本土企业已生产出自主研发的线控转向系统。在这种情况下,需要搭建我国线控转向法规标准体系,通过建立标准化测试方法,指导线控转向系统研发及其产业健康发展。于2025年12月发布的GB 17675—2025《汽车转向系 基本要求》强制性国家新标准,对线控转向基本技术要求进行了规范,也标志着我国线控转向法规标准体系建设正逐步完善。
1 线控转向的发展、基本结构及工作原理
1.1 线控转向技术发展概述
转向系统经历了从机械转向、液压助力转向、电动助力转向再到线控转向的发展历程。GB/T 35360—2017 《汽车转向系统术语和定义》中明确指出:线控转向系统为完全依靠电能操纵的转向系统。对比电动助力转向,线控转向电控设计难度大,功能安全要求严格,成本更高。虽然电动助力转向目前技术最成熟、装车应用最广,但线控转向与主动转向技术结合,可增强车辆在危险工况(转向不足、转向过度、侧滑等)下的操纵稳定性,且根据车速不同转向比可变,能同时提高车辆低速机动性和高速操纵稳定性,而可变路感功能则定制化满足了不同驾驶员转向手感需求,可为实现高级别自动驾驶提供技术基础。
线控技术最早应用于飞机控制系统,直到上世纪末,国外车企相继推出了多款线控转向概念车。2000年以后,随着线控转向技术进一步发展,我国高校及科研院所开始着手该技术的研究,在国内从事生产的车企也纷纷在线控转向领域进行积极的实践,并相继推出了线控转向量产车型。其中,日产汽车于2013年首次在量产车型搭载线控转向系统,但其除电子系统多备份外,转向盘与转向器间还装有转向离合器作为机械备份;丰田汽车于2022年推出线控转向车型,采用多电子备份保证在一路失效后仍能完成预定转向动作,但当时受我国法规标准限制,其国产化车型采用的还是机械连接式转向系统;长城汽车于2023年推出的智慧线控底盘包含线控转向技术,设计了三套备份的电源、传感器、控制器和执行器,针对电子备份失效设计了跨系统备份,可通过制动系统对两侧车轮施加不同制动力,控制车辆横向运动以实现转向动作;蔚来汽车于2024年推出了我国首款线控转向量产车型ET9,系统无机械备份,采用电子系统多路冗余。今年年初,蔚来汽车又推出了第二款线控转向量产车型ES9。
1.2 线控转向系统基本结构及工作原理
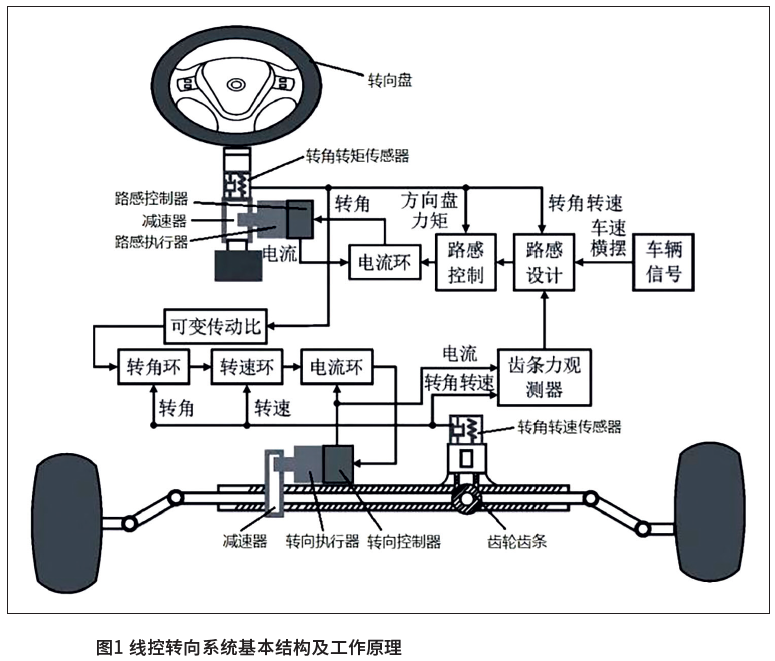
线控转向系统主要由没有机械连接的上下两部分组成,如图1所示。其中,上转向包括转向盘、转角转矩传感器、路感控制器、路感执行器和减速器等;下转向包括转向执行器、转向控制器、转角转速传感器、减速器和齿轮齿条等。执行器电机采用六相永磁同步电机或多电机备份,在某相或某个电机发生故障后仍有备份继续驱动,同时具备低惯量、低转矩波动特性,采用矢量控制、闭环PI控制和弱磁控制等技术,能给予驾驶员更加精确、灵敏的转向操纵手感,在CAN(控制器局域网)总线外加私CAN,部件采用多路冗余,以保证稳定、准确的信号传输及持续的电源供应。
如图1所示,上转向中的转角转矩传感器采集驾驶员转向盘转角和转矩,转角信号经可变转向比控制处理后得到期望车轮转角;下转向中的转角转速传感器采集车轮转角和转速,转向控制器采集转向执行器电流,系统通过转角环、转速环和电流环控制跟踪期望车轮转角。车轮转角、转速及转向执行器电流信号经齿条力观测策略可得实时齿条力,结合转向盘转角和转矩信号及整车控制器采集的车速、横摆角速度计算出期望路感,转向盘力矩和路感执行器电流信号经以电流环为基础的路感控制策略跟踪期望路感[2]。
2 线控转向法规标准研究
2.1 国内外线控转向法规标准发展概述
国外对线控转向相关法规标准的研究起步较早。其中,UN R79《关于车辆转向设备批准的统一规定》是早期转向系统重要标准之一,目前已从机械转向扩展至线控转向。2024年5月发布的德国工业标准DIN 70065《道路车辆-线控转向系统要求》,是近年来线控转向领域最重要的标准。它结合了ISO 26262《道路车辆功能安全》要求,能更全面的验证线控转向系统运行的安全性。
我国对线控转向相关法规标准的制修订也在提速。早在强制性国家标准GB 17675—1999《汽车转向系 基本要求》中就定义了全动力转向,其转向力完全不靠人力。线控转向是全动力转向的一种具体形式,但GB 17675—1999标准3.3条款“不得装用全动力转向机构”的要求,限制了线控转向在汽车的应用。该标准后续修订为GB 17675—2021《汽车转向系 基本要求》,不再限制全动力转向,并加入了功能安全要求。2021年,全国汽车标准化技术委员会线控转向工作组启动了开展线控转向相关国家标准的制修订工作[3],并于2025年12月发布了GB 17675—2025《汽车转向系 基本要求》新版标准,全面规范了全动力转向性能要求和测试方法,成为线控转向车型量产化的法规标准基础依据。
2.2 DIN 70065标准内容分析
该标准在总体内容上描述并界定了线控转向系统,给出了线控转向系统的基本安全目标,限定了其可用性的一般要求、系统首次发生故障时的可控性要求及故障发生后降级和切换过程中的可控性要求,并给出了测试工况[4]。
其中,车辆在行驶过程中要避免的故障可据根据安全目标导出,标准中线控转向系统安全目标主要包括5种,即:SG1,避免自动转向;SG2,避免丧失转向能力;SG3,避免丧失手感反馈力矩;SG4,避免方向盘非预期卡滞;SG5,避免上下执行器不同步。
首次发生故障时的可控性测试工况分为:(1)直线行驶。车速80km/h(公里/小时),车道宽度2.5m(米),或120km/h,车道宽度3.25m;(2)转弯行驶。转弯半径80〜100m,至少5m/s2((米/平方秒)侧向加速度,车道宽度3m;(3)蛇行绕桩。以至少5m/s2侧向加速度进行18m蛇行绕桩,车道宽度2.75m。
首次发生故障时的可控性采用侧向加速度扰动量Δay、横摆角速度扰动量ΔΨ客观评价或专业驾驶员主观评价,验证其是否满足ISO 26262规定的C0(可控)、C1(简单可控)级别。
故障发生后降级和切换过程中的可控性测试工况分为:(1)8字行驶。测试路线由两个半径9m的圆组成一个8字形,车道宽度为3.5m,以标准规定的操控序列行驶,对应不同侧向加速度和车速;(2)直线自动停车。以标准规定的操控序列直线行驶,对应不同车速和减速度;(3)蛇形绕桩及其自动减速。车道宽度为3.5m,绕桩桩桶间距为36m,在其自动减速工况中需根据操控序列规定车速和侧向加速度确定桩桶间距;(4)双变道。测试路线按照ISO 3888-2《乘用车 紧急变线试验车道 第2部分:避障》布置,以不同操纵序列要求的车速和侧向加速度行驶;(5)梯度转向。不设车道边界,车辆加速到规定速度,增大方向盘角度,使侧向加速度均匀增加。
故障发生后降级和切换过程中的可控性要求不偏离测试车道,同时达到相应操纵序列的初始车速、终止车速、减速度、侧向加速度及其变化率等。
2.3 GB 17675—2025、UN R79标准分析
GB 17675—2025在修订过程中参考了UN R79及其修正案内容[5]。 GB 17675—2025为更清晰描述全动力转向的控制及能量传输过程,新增了多条术语,包括蓄电装置、供电装置、能量管理系统等,其相互间的逻辑关系如图2所示。该标准4.3.3条款是专门对全动力转向的要求,是本文法规标准研究的重点。
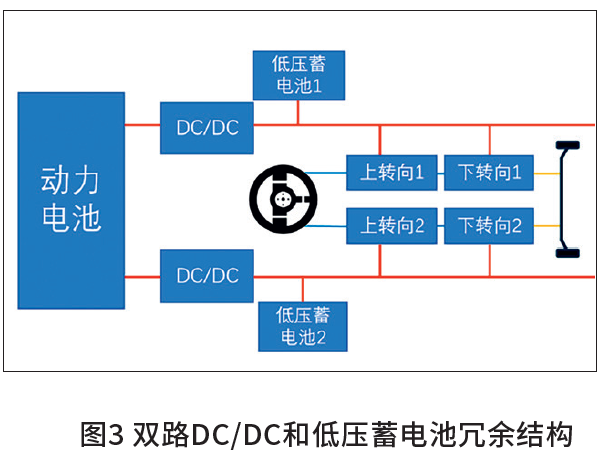
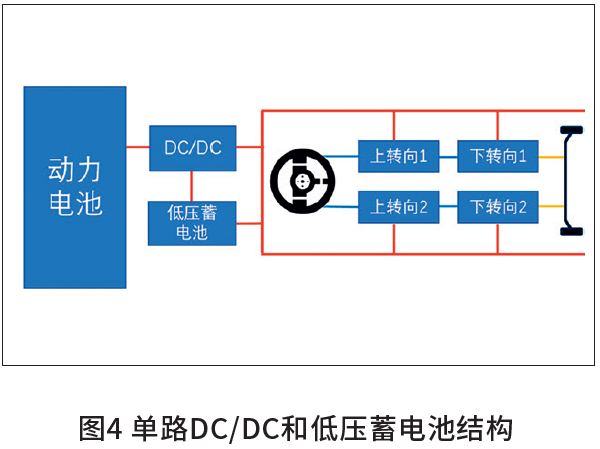
GB 17675—2025标准4.3.3.2条款要求,当全动力转向控制传输内部发生故障时,车辆仍能满足转向系统完好时的性能要求(包括转向操纵力和时间)。图3为电动汽车双路DC/DC和低压蓄电池冗余的线控转向结构图、图4为电动汽车单路DC/DC和低压蓄电池的线控转向结构图,其中,动力电池即供电装置、低压蓄电池即蓄电装置,控制传输内部是转向盘连接上转向的蓝线部分。
GB 17675—2025标准4.3.3.3条款要求,当控制传输的动力源或供电装置发生故障时,车辆在车速10 km/h、回转半径20m的条件下,至少完成24次8字行驶,转向操纵力仍能满足转向系统完好时的性能要求。该故障将导致图4结构中的低压蓄电池无法充电,如果低压蓄电池容量过小将无法满足本条款要求。故本条款加入了若能量传输与控制传输共用同一动力源或供电装置时,车辆可满足该标准4.3.3.6条款替代,包括安全状态、降级要求、储能水平要求、减速度要求、允许开始自动减速的时间要求、报警信号、驻车要求和能量管理系统要求。这与UN R79和DIN 70065的降级和切换过程要求进行了协调。
另外,GB 17675—2025标准4.3.3.4条款要求,当能量传输内部出现故障时,只要行驶车速大于10km/h,应至少进行25次8字行驶,回转半径20m,转向操纵力应满足转向系统出现故障后的性能要求,以减轻驾驶员操作变道难度。该要求补充了系统降级后自动减速2m/s2的减速上限要求,减少了车辆在实际行驶时对后车的潜在危险,同时允许车型基于自身安全概念完成 25 次8字行驶(可能在完成之前已限速在10 km/h以下)。
GB 17675—2025标准还结合UN R79附录6增加了全动力转向的功能安全要求,并规定了测试工况,这与DIN 70065首次发生故障时的可控性测试工况类似。一是在附着系数0.8的水平路面上,空载车辆以 80km/h的车速、沿3.5m宽的试验通道中线进行直线行驶;二是在附着系数0.8的水平路面上,空载车辆以5m/s2的侧向加速度驶入半径为80m、3.5m宽的弯道试验通道,并进行稳态绕圆行驶;三是在附着系数约为0.8的水平路面上,空载车辆以5m/s2的侧向加速度进行蛇行绕桩。
3 线控转向实车道路性能测试
3.1测试样车、设备及测试开展
选取了某款搭载线控转向的纯电动乘用车,采用图3中的双路冗余结构。在交通部公路交通试验场动态广场进行了线控转向实车道路性能测试,测试设备布置如图5所示,设备详细信息如表1所示。
GB 17675—2025标准5.4条款是对应4.3.3条款性能要求的测试方法,结合5.2条款将开展以下5种故障测试。一是转向系统故障时的转向操纵力和时间测试。二是控制传输内部故障测试,包括:驶离转向圆时异常振动测试,即车速50km/h沿切线方向离开半径50m圆周;汽车转向回正能力测试,即转向车轮转到最大转向角一半,车速不低于10km/h放开转向盘;转向操纵力和时间测试。三是控制传输供电装置故障测试,即车速10km/h进行24次半径20m的8字行驶,测量转向操纵力。四是能量传输内部故障测试,即车速10km/h进行25次半径20m的8字行驶,测量转向操纵力。五是故障注入后的全动力转向功能安全测试,包括:车速80km/h沿3.5m宽的车道直线行驶;以侧向加速度5m/s2驶入半径80m、3.5m宽的弯道试验通道稳态绕圆;以侧向加速度5m/s2进行蛇行绕桩。
3.2 测试结果与分析
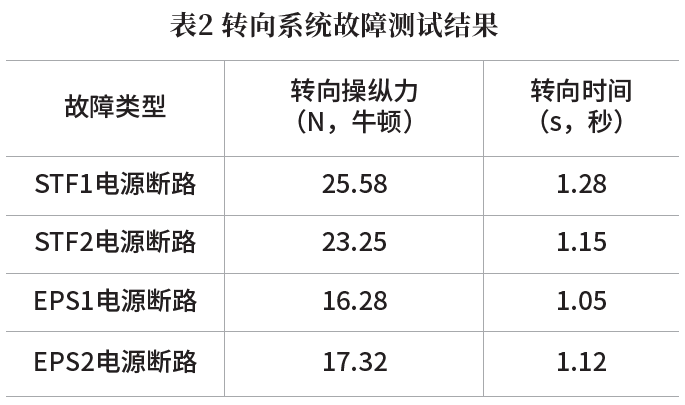
3.2.1 转向系统故障时的转向操纵力和时间
转向操纵力和时间测试结果如表2所示。
3.2.2 控制传输内部故障
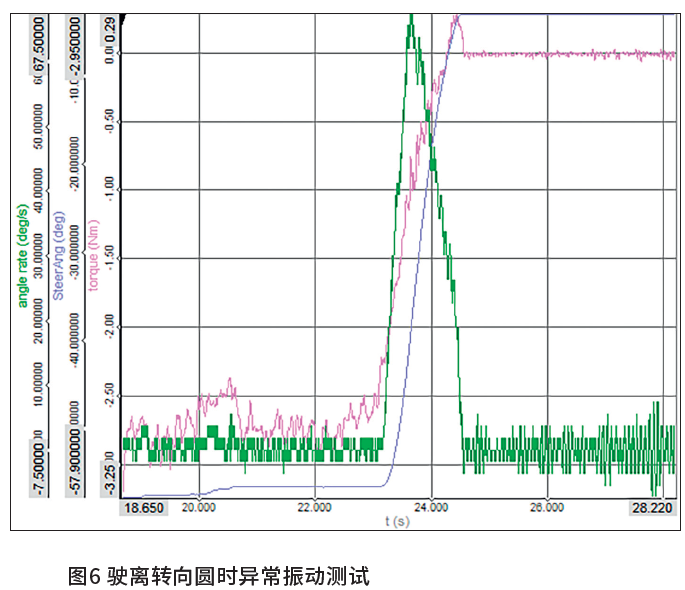
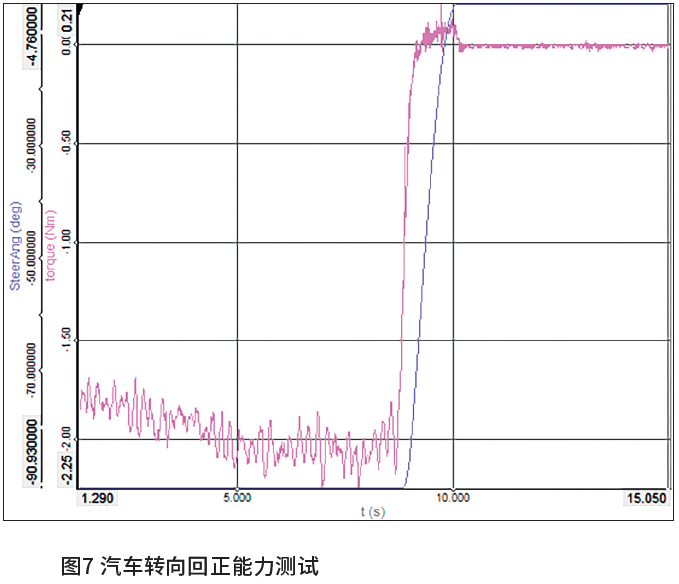
驶离转向圆测试、汽车转向回正能力测试结果分别如图6、图7所示。
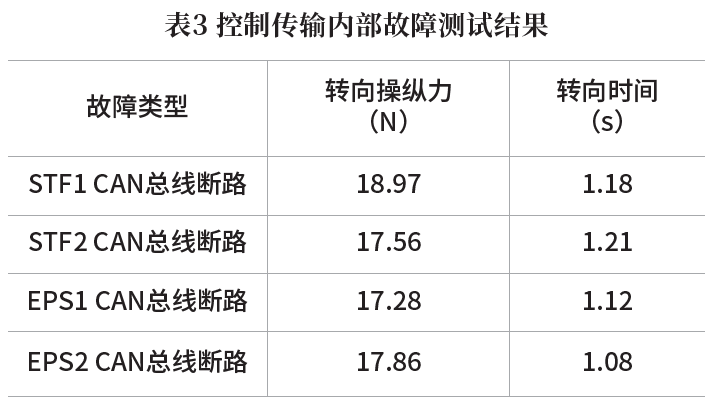
分别注入上、下转向CAN总线断路故障,完成规定工况行驶时线控转向系统无异常振动,具有适度的不足转向特性,转向回正能力正常,转向操纵力和时间测试结果如表3所示。转向操纵力≤150N(牛顿),转向时间≤4s,均满足转向系统完好时的性能要求。
3.2.3 控制传输供电装置故障测试
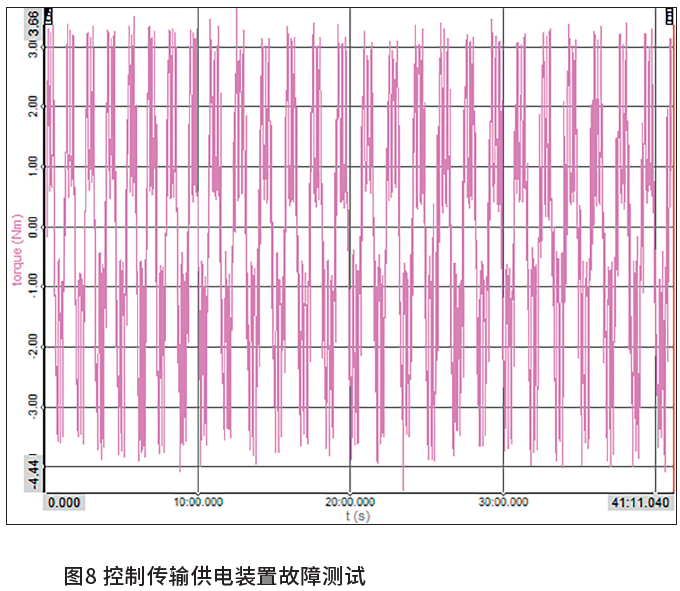
断开动力电池与一路DC/DC到低压蓄电池的供电,测试结果如图8所示,完成了24次8字行驶,最大转向操纵力为23.25N,满足转向系统完好时的性能要求。
3.2.4 能量传输内部故障测试
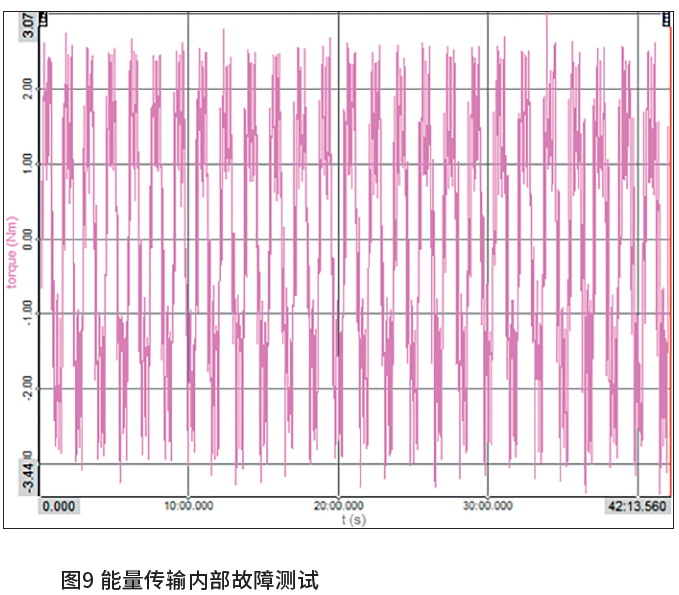
断开一路EPS电源,测试结果如图9所示,完成了25次8字行驶,最大转向操纵力为18.36N,满足转向系统出现故障后的性能要求。
3.2.5 故障注入后的线控转向功能安全测试
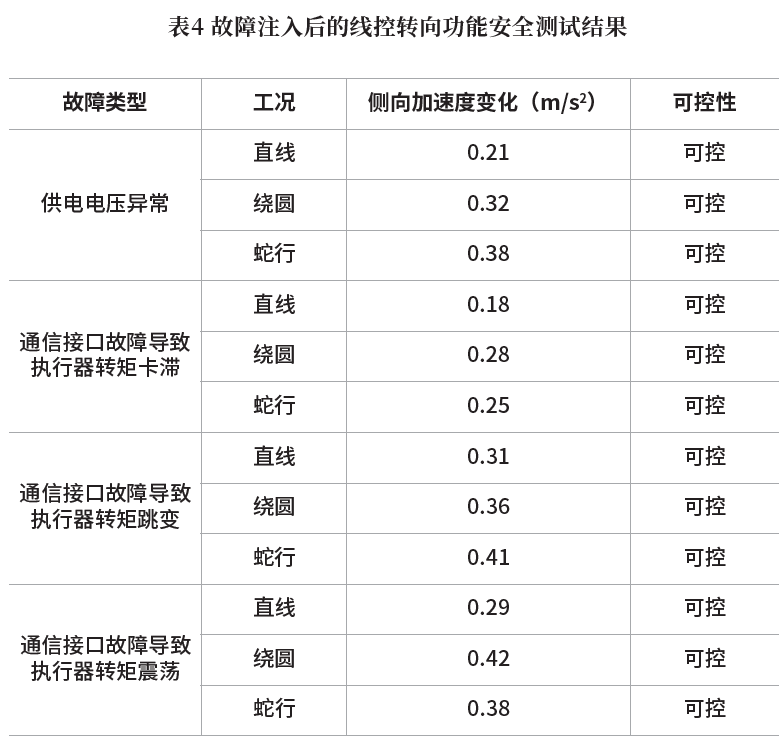
选择了GB 17675—2025标准中四种典型线控转向功能安全测试故障,在相应工况下的测试结果如表4所示,直线侧向加速度变化最大为0.31m/s2,绕圆侧向加速度变化最大为0.42m/s2,蛇行侧向加速度变化最大为0.41m/s2,所有工况下行驶均可控,未偏离3.5m宽测试通道。
4 结论
本文采用法规标准技术探究与实车道路性能测试相结合的方法,对汽车线控转向法规标准及测试方法进行了深入分析。总结了线控转向及其法规标准的发展,探究了线控转向系统的基本结构及工作原理,为今后线控转向技术路线的制定提供了理论依据。同时,对DIN 70065、 GB 17675—2025、UN R79标准内容进行了比较分析研究,并依据GB 17675-2025新标准开展了线控转向实车道路性能测试,验证了该标准性能要求和测试方法对线控转向车型的适用性,从而为相关法规标准制修订提供参考。
参考文献
[1] 郭王虎.智能网联汽车技术路线图2.0发布[J].智能网联汽车,2020(06):10-13.
[2] 中国汽车工程学术研究综
述·2023[J].中国公路学报,2023,36(11):69.
[3] 王国超,高森祺.汽车线控转向系统研究综述[J].汽车文摘,2024(03):9-20.
[4] German Institute for Standardization.Road vehicles -Requirements for a Steer-by-Wire -system:DIN 70065[S], 2024.
[5] 中华人民共和国工业和信息化部.汽车转向系 基本要求:GB 17675-2025[S].中国标准出版社,2025.